안녕! 좋은 일을 하면 좋은 일이 생긴다.주혜란의 트윙굿입니다.
지난 번에 이어 계명대학교에서 진행하고 있는 SW·AI 교육캠프 중 고등학생들을 위해 준비한 수업을 소개합니다.

고등학생을 대상으로 수업한 주제는 코딩으로 완성하는 자율주행 자동차입니다.이번에도 레고 에듀케이션 스파이크 프라임을 활용하여 수업을 진행하였습니다.
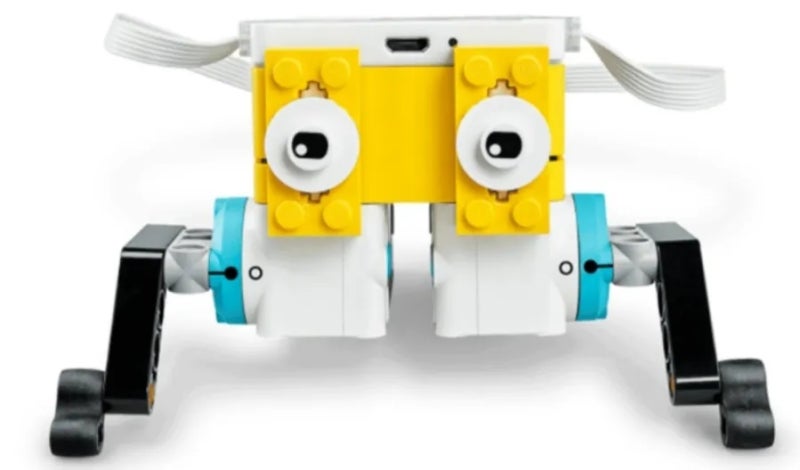
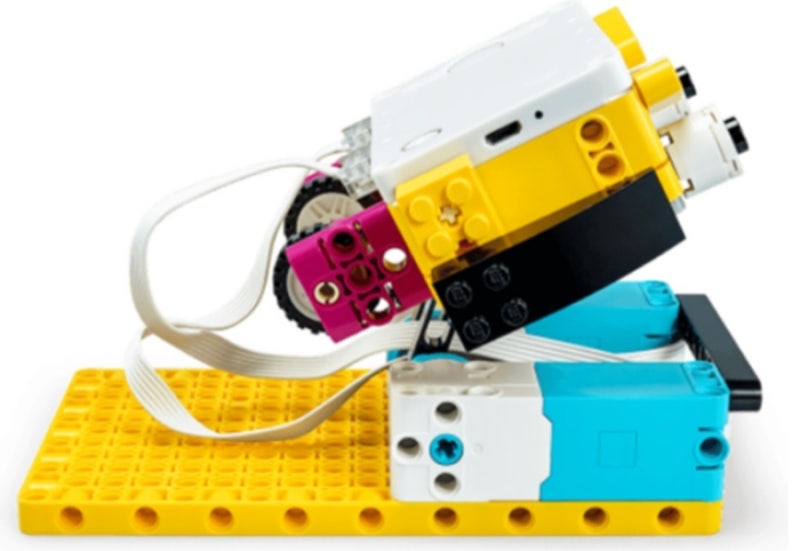
처음에는 이전 수업과 마찬가지로 스파이크 프라임과 친해지기 위해 메뚜기 로봇을 만들어 레이스를 진행했습니다.기본적인 모터 활용 방법과 스파이크 프라임의 다양한 부품을 파악하고 레이스를 진행해 주었습니다.

처음에는 이전 수업과 마찬가지로 스파이크 프라임과 친해지기 위해 메뚜기 로봇을 만들어 레이스를 진행했습니다.기본적인 모터 활용 방법과 스파이크 프라임의 다양한 부품을 파악하고 레이스를 진행해 주었습니다.

처음에는 이전 수업과 마찬가지로 스파이크 프라임과 친해지기 위해 메뚜기 로봇을 만들어 레이스를 진행했습니다.기본적인 모터 활용 방법과 스파이크 프라임의 다양한 부품을 파악하고 레이스를 진행해 주었습니다.
그리고 로봇의 손을 만들어 활동했습니다.로봇 손을 만들고 어떻게 하면 로봇 손을 이용해 물체를 잡을 수 있는지 알아봤습니다.이번에는 스파이크 앱 스크래치와 파이썬을 모두 이용하는 방법을 알아봤습니다.양쪽 코드에서 프로그램을 작동시켜보고 알고리즘이 같은 동작으로 움직임을 확인했습니다.그리고 직접 만들어서 프로그램을 작성한 로봇팔을 이용해서 직접 브릭을 옮겨봤습니다.양쪽 코드에서 프로그램을 작동시켜보고 알고리즘이 같은 동작으로 움직임을 확인했습니다.그리고 직접 만들어서 프로그램을 작성한 로봇팔을 이용해서 직접 브릭을 옮겨봤습니다.양쪽 코드에서 프로그램을 작동시켜보고 알고리즘이 같은 동작으로 움직임을 확인했습니다.그리고 직접 만들어서 프로그램을 작성한 로봇팔을 이용해서 직접 브릭을 옮겨봤습니다.이렇게 센서를 이용해서 로봇을 제어하는 방법을 알아봤습니다.그리고 다음 활동은 스트리트 컬링 스톤입니다.이번 활동에서는 컬러 센서를 이용하여 색상을 구분하고 변수를 이용하는 방법에 대해 배웠습니다.이번 활동에서는 컬러 센서를 이용하여 색상을 구분하고 변수를 이용하는 방법에 대해 배웠습니다.먼저 바퀴의 직경을 이용하여 둘레를 구하는 방법을 알아보고 변수에 어떻게 적용시킬지 생각해 보았습니다.컬러 센서로 바퀴에 희색과 검은 색을 감지하여 회전수를 세고 그것을 이용하여 바퀴 주위와 곱해서 움직인 거리를 조사했습니다.이렇게 모터를 이용하지 않지만 센서만 이용해서 활동해봤습니다.그리고 마지막 활동으로 자율주행차의 기본인 로봇이 선을 따라 움직이는 방법을 알아봤습니다.드라이빙 베이스를 만들고 라인을 어떻게 하면 따라갈 수 있을지 알아봤습니다.이번에도 역시 파이썬 코드와 스크래치 코드를 병행해서 알아봤습니다.먼저 센서 하나만을 이용하여 선을 따라가는 방법을 알아보고 센서 2개를 이용하여 선을 따라가는 방법도 배웠습니다.그리고 자율주행차가 사고를 방지하기 위해 거리 센서를 추가했고, 앞에 갑자기 장애물이 나타났을 때 정지하는 방법도 알아봤습니다.이렇게 고등학생을 대상으로 한 코딩으로 완성하는 자율주행 자동차 캠프를 마쳤습니다.이틀간의 캠프에서 소프트웨어, AI에 더 가까워진 친구들의 모습을 볼 수 있었습니다.이렇게 고등학생을 대상으로 한 코딩으로 완성하는 자율주행 자동차 캠프를 마쳤습니다.이틀간의 캠프에서 소프트웨어, AI에 더 가까워진 친구들의 모습을 볼 수 있었습니다.