자율주행이 완전 자동화되면 운전에 사용한 시간을 내 것으로 만들 수 있고 우리의 생활은 더욱 업그레이드 될 것입니다. 이러한 삶을 꿈꾸는 의미에서 현재의 자율주행 수준에는 훨씬 못 미치지만 이번 실험과목에서 배운 알고리즘과 엔비디아제츠온XAVIERNX보드를 사용하여 자율주행 1.5단계를 표현하고자 노력했습니다.
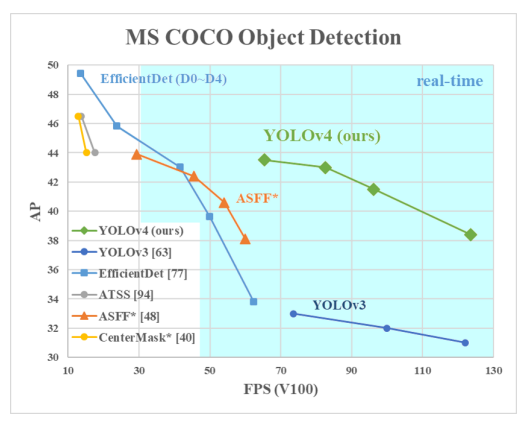
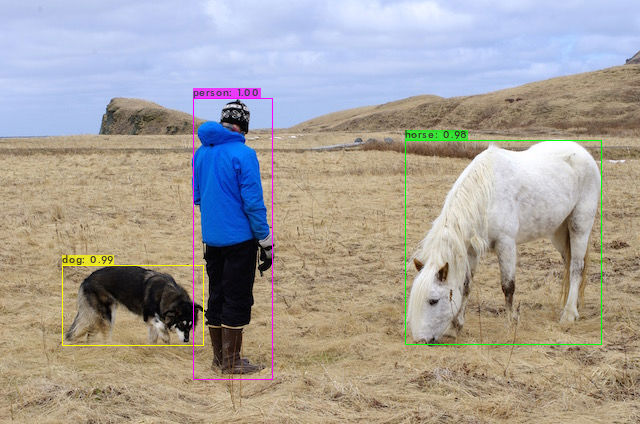
실시간 물체 인식에 좋은 성능을 보이는 YOLOv4를 이용해 차량과 신호등, 그리고 사람을 인식했습니다.그리고 OpenCV를 이용해 차선을 인식하고 앞차, 옆차, 가/감속을 표시해 주었습니다.
두 사람의 동기와 함께 진행했고 한 친구가 PPT를 만들었습니다.
사실 신호등 인식은 5G 통신을 통해 하는 게 정확하지만 만일의 상황에 대비해 영상 처리라도 인식하고 있어야 할 것 같습니다.


OpenCV를 이용하여 차선 인식도 포함시켰습니다.마지막 시연 영상은 저작권 때문에 캡처 사진만 올렸습니다.ㅠ
- References 현대차 자율주행 로드맵 미국 자동차공학회에서는 자율주행 단계를 총 6단계로 분류하고 있습니다.www.hyundai.co.kr 영상 DeepDrive PLWarsaw 0002 sequence 4 Kdata setarchive.orgYOLOv4-tiny – 416, int 8 Tensor RTYOLOv4, SSD, MTCN, and GoogleNet-jkjung-avt/tensorrt_demosgithub.com Color Detection A computer Science. Itcontains. Itcontains.3.5그리고 Opencv3.1기준 코드 작성 세팅만 제대로 되면 코피페할 뿐 문제없이 돌아올 것이다…m.blog.naver.comChangingColorspacesLearntochangeimagesbetweendifferentcolorspaces.PluslearntotrakacoloredobjectinavideoImagesofTransformations. different geometric transformations to images like rotation, translation etc. Image Thresholding Learn to convert images to …docs.opencv.org세계에서 가장 작은 AI슈퍼 컴퓨터에서, 모든 AI 프레임워크를 지원합니다.www.nvidia.com