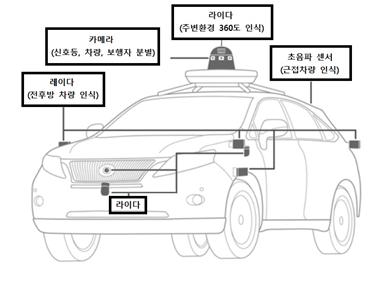
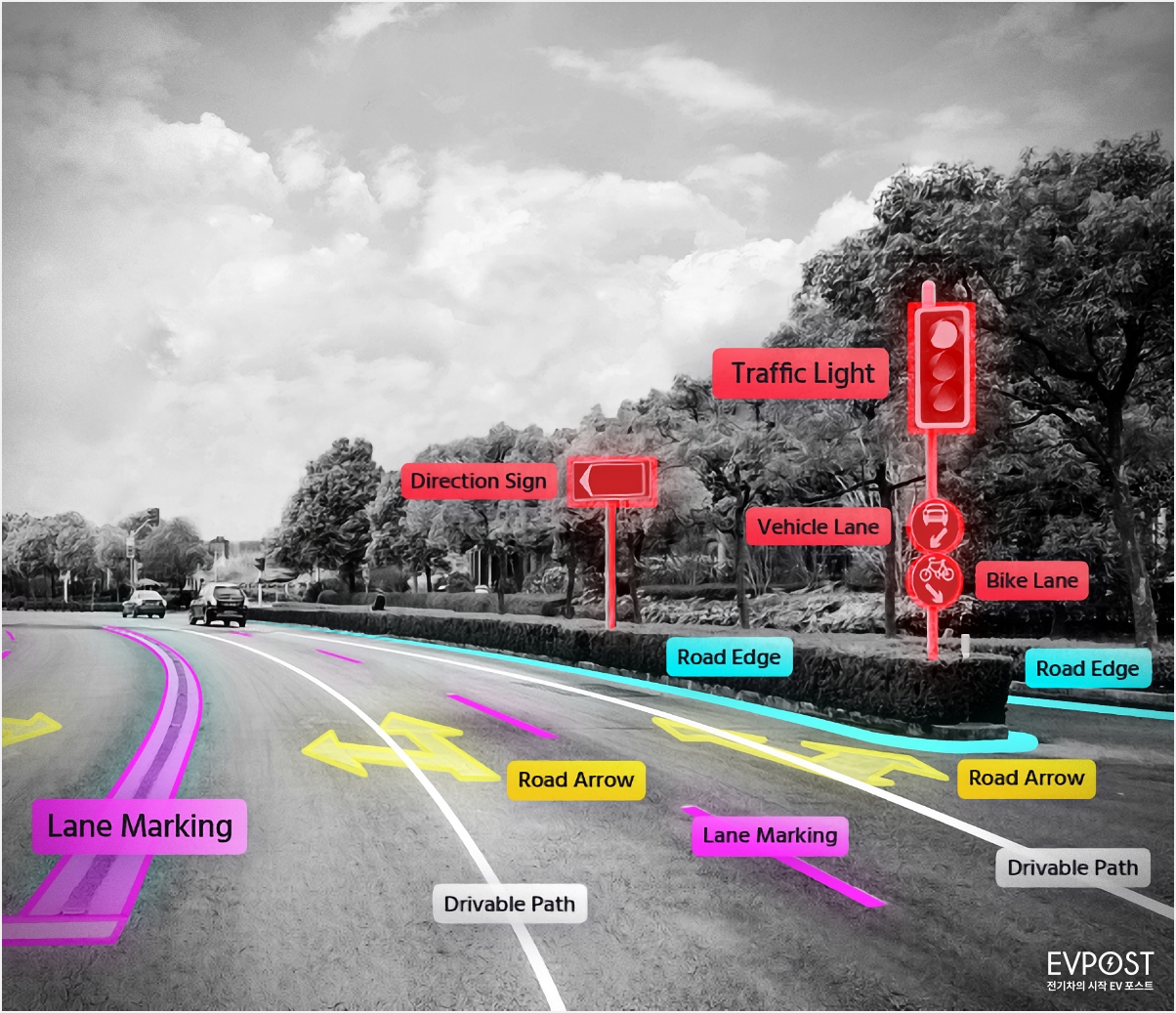
자율주행 자동차란?Automated/Self-driving/Autonomous/Driverless 주변의 물체와 교통상황을 인식하고 판단하여 운전자 조작 없이 스스로 주행하는 자동차-> 딥러닝 기술의 획기적인 발전, HDmap, Lidar/Radar 등 다양한 센서의 성능 향상과 비용 절감으로 상용화가 진행 중이다.

공정 과정
자율주행차는 이전 포스팅에서도 말했듯이 판단, 제어로 나뉜다.그 인지 판단 제어 3가지 방법에 대한 프로세싱 과정이 위 그림과 같이 진행된다.
자율주행자동차 발전계획과 발전사항에 대한 표는 위 그림과 같다.(OD:operational Designdomains: 쉽게 말해 자율주행에 도움이 되는 인프라가 모두 갖춰진 지역을 가리킴)
ADAS(Advanced Driver Assistance System) 말 그대로 운전자를 지원하는 시스템이다.
주로 자율주행차를 개발하는 단계에서 점진적 개발을 하는 현재의 자동차 회사들이 이러한 개발 과정을 많이 채택하고 있는데, 이 과정의 과도기에 있는 기술이라 할 수 있다.
요즘 차는 컴퓨터에 가까워지고 있다는 얘기는 다들 들어봤을 거야.
이때의 컴퓨터를 ECU라고 한다(Electronic Control Units)
자동차 구동에 필요한 전자장치 제어와 차량상태 모니터링 등 다양한 기능을 수행하는 컴퓨터 칩이다.
차량 및 주변 차량의 움직임을 예측해 신속한 판단 및 제어 능력이 필요한 칩이다.


ADAS가 가지고 있는 개요는 위와 같다.
이제 ADAS가 갖는 또는 수행할 태스크에 대해 하나하나 살펴보자.
- 전방 충돌 경보/방지 보조 시스템 : FCW, FCA 등이 있다. (Radar, camera, LiDAR 센서 이용)
- 2. 차선이탈경고/방지/유지보조시스템 : LDW, LKA, LFA 등이 있다.LKA는 차선을 따라가는 시스템이고 LDW는 차량이 차선을 이탈했을 때 경고를 주는 시스템이고, LFA는 차선 유지를 보조하는 시스템으로 LFA가 차량의 움직임을 가장 제한하는 시스템이라 할 수 있다.
3. 사각지대 감시 및 충돌경고 시스템 : BCW 시스템을 이용하여 차선 변경 시 사각지대(후측방) 감시 및 충돌을 경고한다.
4. 하이빔/로빔 보조시스템 : LBA-하향등 보조시스템으로서 야간 및 저조도 환경에서 가시거리 확보를 위해 로빔 방향을 제어하는 시스템 HBA-야간 저조도 환경에서 대향하는 차량 운전자의 눈부심을 방지하고 가시거리 확보를 위해 상향등의 작동을 제어한다.5. 적응형 순항 제어 시스템 ACC/SCC 운전자가 페달이나 스티어링을 조작하지 않고도 운전자의 설정 속도와 전방 차량의 안전거리를 유지하면서 주행하는 시스템
ADAS의 장단점
장점 : 운전자 지원, 편의성 향상, 교통사고 저감 등의 긍정적인 효과
단점 : 다양한 센서와 컴퓨터 비전 기반 시스템 등의 정보를 통합하여 결과를 추출하므로 어려운 개발 난이도가 있으며 안전을 위해 충분한 데이터와 검증이 필요해 개발의 어려움이 있다.
그러나 앞으로 아직 자율주행차가 실제 상용화되기 위해서는 많은 기술적 발전이 필요하기 때문에 그 전까지는 ADAS를 유용하게 활용할 것으로 보인다.